STM32F103C8T6 + Keil5 学习笔记
从建工程到点灯、流水灯、定时器中断
这份笔记不是为了“背代码”,而是为了搞清楚:
STM32 到底是怎么一步一步把一个引脚控制起来的。
先从最简单的点灯开始,再��过渡到流水灯,最后用定时器中断来控制灯的变化。
1. 先讲整体思路
刚接触 STM32 的时候,很容易有这种感觉:
- 工程一大堆文件,看不懂
- 一堆寄存器名字,像天书
- 点个灯还要先开时钟、配模式
GPIOC->CRH、RCC->APB2ENR这些写法很陌生
其实别急,STM32 的套路很固定:
STM32 控制外设,基本就三步
-
先开时钟
没有时钟,这个外设就像没供电,根本不会工作。 -
再配模式
告诉引脚:你现在是输入、输出、复用,还是模拟功能。 -
最后读写寄存器
比如输出高电平、低电平,或者读取按键状态。
只要这三个步骤想明白了,后面 GPIO、定时器、串口,思路其实都差不多。
2. Keil5 创建 STM32 工程
2.1 新建工程
打开 Keil5,依次点击:
Project -> New uVision Project...
然后新建一个文件夹,比如:
STM32_LED
工程名可以随便起,比如:
LED_Project
2.2 选择芯片
Keil 会弹出芯片选择窗口,在搜索框输入:
STM32F103C8
选择:
STMicroelectronics -> STM32F103C8Tx
然后点确定。
3. 认识 RTE 窗口
工程建好后,有时候会弹出 RTE 窗口。
RTE 的全称是:
Run-Time Environment
你可以把它理解成:
给工程选择“现成组件”的地方。
比如:
- 启动文件
- CMSIS 核心支持
- 设备相关支持
- 驱动组件
3.1 这个窗口里几个常见栏目什么意思
Software Component
表示“可选的软件组件”。
比如:
CMSIS Device Startup Driver
它们就是工程里要用到的基础模块。
Variant
表示“变体”。
同一个功能,可能有不同实现版本,比如:
标准库版本 HAL 版本 某个厂商定制版本
Vendor
表示提供这个组件的厂商。
比如:
STMicroelectronics ARM Keil
3.2 点灯工程一般要选什么
做最基础的 STM32 工程时,通常只要最核心的部分:
CMSIS -> CORE
Device -> Startup
如果你不太确定怎么选,可以直接点左下角的:
Resolve
Keil 常常会自动帮你补全依赖项。
3.3 工程里会自动出现什么文件
配置完以后,左侧工程栏一般会看到类似文件:
startup_stm32f10x.s
system_stm32f10x.c
这两个文件很关键。
startup_stm32f10x.s 是什么
这是启动汇编文件,主要负责:
- 初始化堆栈
- 设置中断向量表
- 跳转到 main() 函数
你可以把它理解成:
芯片上电后,先跑的一段“开机引导程序”
system_stm32f10x.c
这个文件主要负责:
- 系统时钟初始化
- SystemInit() 的相关配置
你可以把它理解成:
给芯片整个运行环境做底层准备
4. 新建 main.c
工程框架有了以后,还要自己写程序逻辑。
建立工程直接跳过,就在Source Group 1里边自己整一个main.c就行
5.先理解:点灯到底在做什么
STM32 的“点灯”,本质上不是一句“让灯亮”那么简单,而是先把那个引脚变成输出模式,再给它一个电平。
以 PC13 为例,点亮板载 LED 的步骤一般是:
- 打开 GPIOC 时钟
- 把 PC13 配成输出
- 输出高电平或低电平
5.1 为什么第一步总是开时钟
外设默认不是一直工作的。
如果你不先开时钟,它就相当于还没通电,后面的配置也没意义。
所以 STM32 里很常见的一句代码就是:
RCC->APB2ENR |= (1 << 4);
它的意思是:
打开 GPIOC 的时钟
5.2 为什么要先配模式
引脚不是天生就知道自己该做什么。
它可以是:
- 输入
- 输出
- 复用功能
- 模拟输入
所以程序必须先告诉它:“你现在要当输出口用。”
6. GPIO常见模式
这个地方如果不讲透,后面很容易一头雾水。
6.1核心原理图解
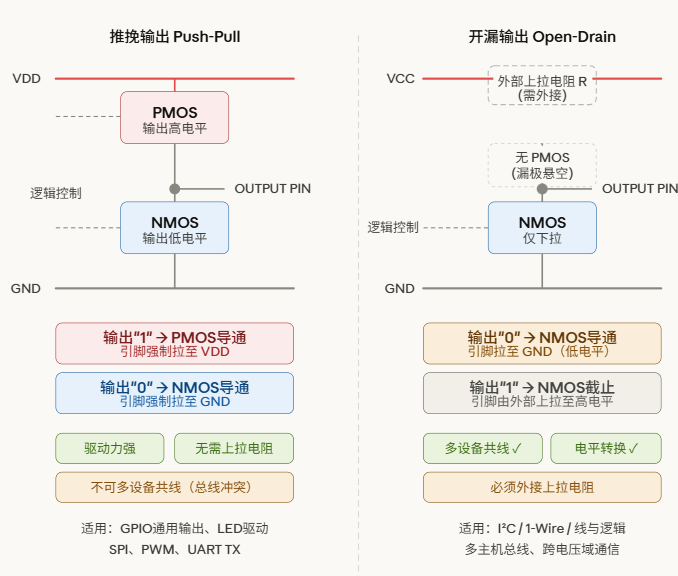
6.2推挽输出(Push-Pull Output)
工作原理 推挽结构内部有两个互补的晶体管(PMOS + NMOS):
- 输出逻辑 1 → PMOS 导通,NMOS 截止 → 引脚被强制拉到 VDD(高电平)
- 输出逻辑 0 → NMOS 导通,PMOS 截止 → 引脚被强制拉到 GND(低电平)
无论输出高还是低,引脚始终有主动驱动,因此驱动电流大、边沿陡峭、抗干扰能力强。
主要应用场景
- 适合所有单点驱动、独立控制的场合:LED、继电器、单片机之间的单向通信(UART TX、SPI MOSI/SCK/CS)、PWM 信号输出等。
6.3开漏输出(Open-Drain Output)
工作原理 开漏结构只有 NMOS,没有 PMOS。漏极悬空("开漏"即此意):
- 输出逻辑 0 → NMOS 导通 → 引脚拉到 GND
- 输出逻辑 1 → NMOS 截止 → 引脚悬空,需要外部上拉电阻将其拉高
关键特性:引脚输出高电平时完全依赖外部电阻,所以高电平的值由外部上拉电压决定,而不是芯片自身的 VDD。
6.4主要应用场景
| 场景 | 原因 |
|---|---|
| I²C 总线(SDA / SCL) | 多个设备共用同一根线,任何一个设备将线拉低即表示 0,不会产生总线冲突 |
| 线与逻辑(Wired-AND) | 多设备并联,只要一个输出 0 整条线就是 0,天然实现"与"逻辑 |
| 电平转换 | STM32 是 3.3V,外部设备是 5V;上拉到 5V,引脚只需控制是否拉低,无需承受 5V 输入 |
| 1-Wire / SMBus | 同上,单线双向、多从机协议均依赖开漏特性 |
6.5核心区别对比
| 维度 | 推挽 | 开漏 |
|---|---|---|
| 内部结构 | PMOS + NMOS | 仅 NMOS |
| 高电平来源 | 芯片内部 VDD | 外部上拉电阻 |
| 多设备共线 | ❌ 会短路 | ✓ 安全共线 |
| 驱动能力 | 强(源电流 + 灌电流) | 弱(只能灌电流) |
| 速度 | 快(边沿陡) | 较慢(RC 上升沿) |
| 电平转换 | 不支持 | ✓ 支持跨电压域 |
| 需要外部电阻 | 不需要 | 必须 |
6.6 浮空输入(Floating Input)
原理
引脚既没有内部上拉电阻,也没有内部下拉电阻,完全"悬在空中"。 引脚电平完全由外部信号决定。若外部什么都不接,引脚就像天线一样,极易受到电磁干扰,读取到的值是不确定的(可能是 0,也可能是 1,甚至反复跳变)。
VDD
│
╳ ← 无上拉
│
PIN ��──→ 读取值
│
╳ ← 无下拉
│
GND
什么时候用
- 外部电路已经有明确的驱动信号(如另一个芯片的输出引脚直连过来),不需要内部电阻辅助。
- UART RX、SPI MISO 等由对端芯片主动驱动的引脚,通常配置为浮空输入。
初学者注意
如果引脚悬空(什么都不接)却配置为浮空输入,读出的值毫无意义,程序会出现莫名其妙的行为。务必保证外部有确定的驱动源。
6.7 上拉输入(Input Pull-Up)
原理
芯片内部在引脚与 VDD 之间接入一个弱上拉电阻(STM32 典型值约 40kΩ)。 当外部没有信号驱��动时,引脚通过该电阻被"默默拉到"高电平,读取值稳定为 1。 当外部将引脚拉低(接 GND)时,读取值变为 0。
VDD
│
[R 上拉 ~40kΩ] ← 内部电阻
│
PIN ──→ 读取值
│
外部按键/信号
│
GND
最经典的应用:按键检测
按键一端接引脚,另一端接 GND。
- 按键未按下:引脚通过上拉电阻连到 VDD,读到 1。
- 按键按下:引脚被直接拉到 GND,读到 0。
这就是常说的"低电平有效"按键电路,配合上拉输入使用无需外接任何电阻,简洁可靠。
什么时候用
- 按键、拨码开关等机械触点输入。
- I²C 的 SDA / SCL 引脚(配合外部上拉,内部上拉一般太弱)。
- 任何"默认高、触发低"的信号。
初学者注意
上拉电阻是"弱驱动",只要外部有足够的拉低能力就能覆盖它。上拉电阻越大,功耗越低,但响应越慢;STM32 内部上拉约 40kΩ,适合低速信号。
6.8 下拉输入(Input Pull-Down)
原理
与上拉输入相反——芯片内部在引脚与 GND 之间接入一个弱下拉电阻(同样约 40kΩ)。 当外部没有信号驱动时,引脚通过该电阻被拉到低电平,读取值稳定为 0。 当外部将引脚拉高(接 VDD 或输出高电平)时,读取值变为 1。
VDD
│
外部按键/信号
│
PIN ──→ 读取值
│
[R 下拉 ~40kΩ] ← 内部电阻
│
GND
什么时候用
- 按键一端接 VDD,另一端接引脚("高电平有效"按键)。
- 传感器输出为推挽高电平时,用下拉确保无信号时引脚不飘。
- 任何"默认低、触发高"的信号。
上拉 vs 下拉 选择口诀
| 触发方式 | 默认状态 | 选择 |
|---|---|---|
| 按下接 GND(低电平触发) | 默认高 | 上拉输入 |
| 按下接 VDD(高电平触发��) | 默认低 | 下拉输入 |
| 外部有稳定驱动 | 不需要默认值 | 浮空输入 |
6.9 模拟输入(Analog Input)
原理
模拟输入模式下,引脚的数字施密特触发器被完全旁路,引脚上的原始模拟电压直接送入芯片内部的 ADC(模数转换器)。 ADC 将连续的模拟电压(如 0~3.3V)采样并量化为离散的数字值(如 STM32 的 12 位 ADC 输出 0~4095)。
外部模拟信号(如传感器电压)
│
PIN
│
[施密特触发器 × 禁用]
│
ADC 采样保持电路
│
数字量化结果(0~4095)
│
寄存器
为什么要禁用施密特触发器?
施密特触发器的作用是把模拟信号"掰"成非 0 即 1 的数字信号,这在数字输入时很有用。 但在模拟输入时,我们需要的是完整的电压信息,不能被"非 0 即 1"破坏。 禁用后,模拟信号原汁原味地进入 ADC。
常见应用
| 应用 | 说明 |
|---|---|
| 电位器读取 | 旋转角度转为电压,ADC 读取位置 |
| 温度传感器(NTC/热敏电阻) | 温度变化导致电阻变化,转为电压后 ADC 采集 |
| 光敏电阻 | 光照强度转为电压 |
| 电池电压监测 | 分压后送入 ADC 判断电量 |
| 麦克风 / 音频信号 | 声音波形的模拟采集 |
初学者注意
- 模拟输入引脚的电压范围通常是 0V ~ VDD(3.3V),严禁超过此范围,否则损坏芯片。
- 配置为�模拟输入后,不要再给该引脚配置上拉或下拉,否则会影响采样精度。
- 使用 ADC 前需在 STM32CubeMX 或代码中先开启 ADC 时钟并完成初始化。
四种输入模式总结
| 模式 | 内部电阻 | 默认电平 | 典型用途 |
|---|---|---|---|
| 浮空输入 | 无 | 不确定(禁止悬空) | UART RX、SPI MISO、外部已有驱动的信号 |
| 上拉输入 | 上拉至 VDD(~40kΩ) | 高电平(1) | 按键(低电平触发)、默认高信号 |
| 下拉输入 | 下拉至 GND(~40kΩ) | 低电平(0) | 按键(高电平触发)、默认低信号 |
| 模拟输入 | 无(触发器旁路) | 连续电压值 | ADC 采集、传感器、音频 |
7. 第一段代码:PC13 点灯
寄存器版代码
#include "stm32f10x.h"
void Delay(unsigned int count)
{
while(count--);
}
int main(void)
{
// 1. 开启 GPIOC 时钟
RCC->APB2ENR |= (1 << 4);
// 2. 配置 PC13 为推挽输出
// PC13 属于 8~15 号引脚,所以操作 CRH
GPIOC->CRH &= ~(0x0F << 20); // 先清掉原来的配置
GPIOC->CRH |= (0x03 << 20); // 50MHz 推挽输出
while(1)
{
GPIOC->ODR |= (1 << 13); // 输出高电平
Delay(1000000);
GPIOC->ODR &= ~(1 << 13); // 输出低电平
Delay(1000000);
}
}
这是典型的通过结构体配置寄存器的操作方法,寄存器每个位都是分别管控着不同输入输出的开启,复位,模式等等,所以寄存器的值需要通过查阅STM官方手册获取相关信息。 我用的板子是PC13端口接了一个LED,所以单颗LED的代码,我配置的就是单片机的GPIO13引脚,和这个相关的时钟,已经开关等等。
8. 第二个实验:流水灯
流水灯其实就是:
- 一颗灯亮一下,再换下一颗亮一下。
8.1 为什么要用 PB8~PB15
因为这些引脚正好是 GPIOB 的高 8 位,通过排线连接测试,根据自己的开发版选择对应接线进行配置即可。
8.2 为什么要用 CRH
因为 PB8PB15 都属于 815 号引脚,所以必须操作:
GPIOB->CRH
8.3 为什么可以直接写 0x33333333
每个引脚在 CRH 中占 4 位。
如果你希望 PB8~PB15 全部都是:
- 50MHz 推挽输出
那每一组 4 位都写成 0011,也就是十六进制的 3。
8 个引脚连在一起,整块就是:
0x33333333
8.4 流水灯代码(寄存器版)
#include "stm32f10x.h"
void Delay(unsigned int count)
{
while(count--);
}
int main(void)
{
unsigned short i;
// 1. 开启 GPIOB 时钟
RCC->APB2ENR |= (1 << 3);
// 2. PB8~PB15 全部设置为推挽输出
GPIOB->CRH = 0x33333333;
while(1)
{
for(i = 0; i < 8; i++)
{
// 让第 8 位开始,依次往后亮
GPIOB->ODR = (1 << (8 + i));
// 灯控制逻辑是高电平亮就取反
//GPIOB->ODR = ~(1 << (8 + i));
Delay(1000000);
}
}
}
为什么不建议一直用 Delay
前面�的程序都用了:
Delay(1000000);
这种写法简单,但它有明显问题:
- CPU 一直空转
- 程序在等待期间什么都不能做
- 延时精度一般
- 不利于以后做多任务
所以它适合入门理解,但不适合长期当正式方案。
更好的做法是:
- 用定时器中断来控制节拍
9. 进阶
9.1 状态变化实现流水灯
#include "stm32f10x.h"
void Delay(unsigned int count)
{
while(count--);
}
int main(void)
{
int pos = 8;
int direction = 1;
RCC->APB2ENR |= (1 << 3); // 开 GPIOB 时钟
GPIOB->CRH = 0x33333333; // PB8~PB15 输出
while(1)
{
GPIOB->ODR = ~(1 << pos); // 低电平点亮写法
Delay(1000000);
if(direction == 1)
{
pos++;
}
else
{
pos--;
}
if(pos == 15)
{
direction = 0;
}
else if(pos == 8)
{
direction = 1;
}
}
}
9.2 定时器控制实现流水灯
#include "stm32f10x.h"
#include "stm32f10x_conf.h"
// 2. 定义全局变量
int pos = 8;
int direction = 1;
// 3. 各种初始化函数 (必须放在 main 的上面)
// --- LED 初始化 (使用标准库写法替代之前的寄存器写法) ---
void LED_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 开启 GPIOB 时钟
// 配置 PB8 到 PB15 为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 |
GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 初始化全灭 (高电平灭)
GPIO_SetBits(GPIOB, GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 |
GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15);
}
// --- 中断优先级配置 ---
void NVIC_Configuration(void) {
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
// --- 定时器 2 初始化 ---
void Timer_Init(void) {
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 4999; // ARR
TIM_TimeBaseStructure.TIM_Prescaler = 7199; // PSC
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
// 4. 定时器中断服务函数
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
GPIOB->ODR = ~(1 << pos); // 点亮当前位置的灯
if (direction == 1) pos++;
else pos--;
if (pos == 15) direction = 0;
else if (pos == 8) direction = 1;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除中断标志
}
}
// 5. 主函数
int main(void) {
LED_Init(); // 初始化 LED
NVIC_Configuration(); // 配置中断优先级
Timer_Init(); // 启动定时器
while(1) {
// 流水灯靠 TIM2 中断在后台默默工作
}
}
9.3 定时器控制流水灯的思路
9.3.1 传统方式(阻塞式)
以前控制流水灯,依赖 Delay 函数让 CPU 傻等:
点亮第一颗灯
Delay(500ms) // CPU 被卡在这里,什么都做不了
点亮第二颗灯
Delay(500ms)
...
缺点很明显:Delay 期间 CPU 完全被占用,无法响应其他任务。
9.3.2 定时器中断方式(非阻塞式)
现在的思路是把"等待"交给定时器硬件,CPU 去做别的事:
主程序:空转 / 处理其他逻辑
↓
TIM2 每隔 0.5 秒硬件触发一次中断
↓
CPU 暂停当前任务 → 进入中断函数 → 切换灯状态 → 返回
核心优势
| 对比项 | Delay 方式 | 定时器中断方式 |
|---|---|---|
| CPU 利用率 | 低(等待期间空转) | 高(主循环可处理其他任务) |
| 时间精度 | 受代码执行时间影响 | 由硬件计数,精度高 |
| 可扩展性 | 差 | 好,接近真实项目结构 |
定时器中断是嵌入式开发中最常用的机制之一,掌握它是从"能跑"走向"写得好"的关键一步。
9.3.3 为什么先学 TIM2
STM32F103 系列有多个定时器(TIM1 ~ TIM4 等),入门阶段通常从 TIM2 开始。
STM32 的定时器分三类:
| 类型 | 代表 | 特点 |
|---|---|---|
| 基本定时器 | TIM6、TIM7 | 功能最简单,只能计数和触发中断 |
| 通用定时器 | TIM2~TIM5 | 功能适中,支持输入捕获、输出比较、PWM 等 |
| 高级定时器 | TIM1、TIM8 | 功能最强,支持互补输出、死区控制,用于电机控制 |
TIM2 功能够用、结构不复杂,是学习定时器的最佳起点。
TIM1 是高级定时器,拥有刹车输入、互补 PWM 输出等高级功能,主要用于无刷电机、变频器等场景。初学阶段直接上手 TIM1 会引入很多不必要的配置干扰,容易劝退。
TIM2 的中断处理函数名称固定为:
void TIM2_IRQHandler(void)
{
// 每次定时器溢出,自动跳转到这里执行
}
命名规律清晰:外设名 + _IRQHandler,初学者看名字就能理解它的作用,有助于建立"中断"的直觉概念。
10. 定时器中断的配置步骤
让 TIM2 每 0.5 秒触发一次中断,需要按顺序完成以下 7 步:
第 1 步 开启 TIM2 时钟
第 2 步 配置预分频值 PSC
第 3 步 配置自动重装载值 ARR
第 4 步 使能更新中断(UIE)
第 5 步 配置 NVIC(中断优先级)
第 6 步 启动定时器(CEN 位置 1)
第 7 步 编写中断处理函数 TIM2_IRQHandler
为什么顺序很重要? 如果在时钟开启之前就操作 TIM2 的寄存器,写入的值不会生效; 如果在 NVIC 配置之前就启动定时器,中断可能无法被 CPU 响应。
10.1 定时器时间怎么计算
溢出时间公式
定时器每次计数从 0 数到 ARR,然后产生一次溢出中断。完整公式如下:
T = (PSC + 1) × (ARR + 1) / Clk
各参数含义:
| 参数 | 说明 |
|---|---|
PSC | 预分频寄存器值(Prescaler) |
ARR | 自动重装载寄存器值(Auto-Reload Register) |
Clk | 定时器输入时钟频率(单位 Hz) |
T | 定时器溢出时间(单位 s) |
计数器工作流程:
时钟脉冲 → [÷(PSC+1) 分频] → 计数器每个节拍 +1
计数器:0 → 1 → 2 → ... → ARR → 溢出!触发中断 → 重新从 0 开始
10.2 例:配置 TIM2 每 0.5 秒中断一次
已知条件:
- 系统时钟 = 72 MHz
- 目标定时时间 T = 0.5 s
第一步:选定 PSC,将时钟降到好计算的频率
PSC = 7199
分频后时钟 = 72,000,000 ÷ (7199 + 1) = 10,000 Hz
→ 计数器每秒跳动 10,000 次,即每 0.1 ms 跳一次
第二步:根据目标时间算出 ARR
0.5 秒需要跳动的次数 = 10,000 × 0.5 = 5,000 次
因为计数器从 0 开始,数到 4999 时完成 5000 次跳动
→ ARR = 4999
第三步:验证
T = (7199 + 1) × (4999 + 1) / 72,000,000 = 7200 × 5000 / 72,000,000 = 0.5s ✓
10.3 最终配置结论
TIM2->PSC = 7199; // 预分频:72MHz ÷ 7200 = 10kHz
TIM2->ARR = 4999; // 自动重装:计满 5000 次溢出,即 0.5s
10.4 PSC 和 ARR 的取值范围
| 寄存器 | 位宽 | 最大值 |
|---|---|---|
| PSC | 16 位 | 65535 |
| ARR | 16 位(TIM2 在 F103 为 16 位) | 65535 |
如果需要更长的定时时间(如 10 秒),可以增大 PSC 降低计数频率,或在中断函数里加软件计数器(每进 20 次中断才执行一次操作)。
清除标志位为什么是必须的?
定时器产生中断后,会在状态寄存器 SR 中置位一个标志。
如果不手动清除,CPU 从中断返回后会发现标志仍然为 1,误以为又来了一次中断,从而反复进入中断函数,程序陷入死循环。
附:关键寄存器速查
| 寄存器 | 作用 |
|---|---|
TIM2->PSC | 预分频值 |
TIM2->ARR | 自动重装载值(定时上限) |
TIM2->CNT | 当前计数值(可读可写) |
TIM2->CR1 | 控制寄存器,bit0(CEN)= 1 启动定时器 |
TIM2->DIER | 中断使能寄存器,bit0(UIE)= 1 使能更新中断 |
TIM2->SR | 状态寄存器,bit0(UIF)= 1 表示发生了更新中断 |
总结
这篇笔记的核心不是“写了多少代码”,而是让你明白 STM32 是怎么工作的。
你已经知道了:
- Keil5 怎么建 STM32 工程
- RTE 窗口是干什么的
- 启动文件和系统文件的作用
- 为什么要先开时钟
- GPIO 的常见模式
- PC13 怎么点亮
- PB8~PB15 怎么做流水灯
- CRL 和 CRH 的区别
- 为什么定时器要选 TIM2
- PSC 和 ARR 怎么算
- 中断是怎么接管程序节奏的
最后记住一句话:
STM32 不是”背代码”,而是”理解外设,然后按步骤把它打开、配置、控制起来”。